

摘要:机器人点动控制涉及机器人的精确移动和操作,其原理基于先进的控制算法和传感器技术。应用领域广泛,如工业制造、医疗服务等。优化策略包括提高控制精度、增强响应速度以及优化能源效率。通过深入研究点动控制原理,并针对性地实施应用和优化措施,可推动机器人技术的进一步发展。
本文目录导读:
随着科技的飞速发展,机器人技术已成为现代工业、农业、医疗等领域不可或缺的一部分,作为机器人控制的核心技术之一,点动控制对于机器人的精确操作、高效运作具有重要意义,本文将详细介绍机器人点动控制的原理、应用以及优化策略,帮助读者更好地理解和应用这一技术。
机器人点动控制原理
机器人点动控制是指通过操作员对机器人进行微小精确移动的控制方式,其基本原理是通过控制机器人的关节或末端执行器,使其按照操作员的指令进行微小移动,以达到精确操作的目的,点动控制通常通过操作面板、手持遥控器或者编程软件实现。
机器人点动控制的实现依赖于以下几个关键技术:
1、传感器技术:传感器是机器人实现精确点动控制的关键部件,通过实时监测机器人的位置和姿态,将信息反馈给控制器,以实现精确控制。
2、控制器技术:控制器是机器人点动控制的核心,负责接收传感器信息并处理操作员的指令,控制机器人进行精确移动。
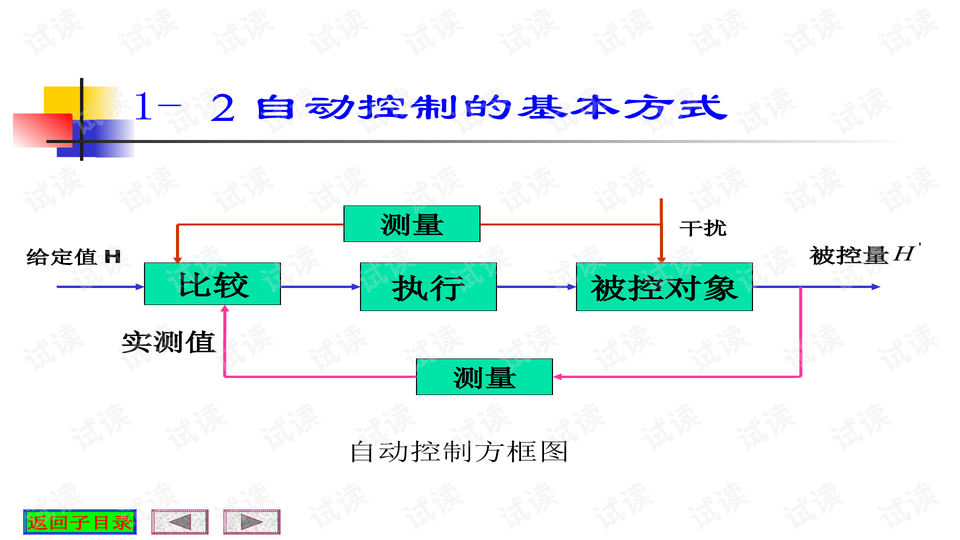
3、动力学模型:动力学模型是机器人点动控制的基础,通过对机器人运动学的研究,建立机器人的运动模型,以实现精确的点动控制。
机器人点动控制的应用
机器人点动控制在许多领域都有广泛的应用,以下是几个典型的应用场景:
1、工业领域:在工业领域,机器人点动控制广泛应用于装配、焊接、搬运等场景,通过精确的点动控制,机器人可以精确地抓取、放置、焊接等,提高生产效率和产品质量。
2、医疗领域:在医疗领域,机器人点动控制被广泛应用于手术辅助、康复训练等场景,精确的点动控制可以帮助机器人在手术中精确执行操作,提高手术成功率。
3、农业领域:在农业领域,机器人点动控制可以用于精准播种、施肥、除草等场景,通过精确的点动控制,机器人可以准确地将种子、肥料等施放到指定位置,提高农业生产效率。
4、救援领域:在灾难救援等场景中,机器人点动控制可以帮助机器人在复杂环境中进行精确操作,如搜索幸存者、破拆障碍物等。
机器人点动控制的优化策略
为了提高机器人点动控制的性能,以下是一些优化策略:
1、提高传感器精度:传感器精度是机器人点动控制的关键,提高传感器精度可以提高机器人的定位精度和姿态感知能力。
2、优化控制器算法:优化控制器的算法可以提高机器人的运动控制性能,如采用智能算法(如神经网络、模糊控制等)来提高机器人的自适应能力和鲁棒性。
3、加强人机互动:通过加强人机互动,可以提高操作员对机器人的控制能力,如采用直观的操作界面、实时反馈系统等。
4、引入机器学习技术:通过引入机器学习技术,机器人可以从实践中学习并优化其点动控制性能,提高机器人的智能水平。
机器人点动控制作为机器人技术的重要组成部分,对于提高机器人的精确操作能力和工作效率具有重要意义,本文详细介绍了机器人点动控制的原理、应用以及优化策略,希望读者能更好地理解和应用这一技术,随着科技的不断发展,机器人点动控制将在更多领域得到广泛应用,并为人类带来更多的便利和效益。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...